
Meet the Team
Our team had 5 seniors, 8 juniors, and 2 sophomores

Trevor Leung
Team Captain Senior |

Emily Lu
Hardware Lead Senior |

Matthew Song
Software Co-Lead Senior |

Martin Xu
Software Co-Lead Driver 1 Senior |

Apoorva Talwalkar
Management Lead Senior |

Naomi Hsieh
Driver 2 Junior |

Jarrett Singh
Coach Junior |

Kai Otsuka
Human Player Junior |

Maithreyi Bharathi
Junior |

Rushil Saraf
Junior |

Matthew Huan
Junior |

Rishab Melkote
Junior |

Sreyash Das Sarma
Junior |

Manlin Zhang
Sophomore |

Alex Yuang
Sophomore |
Our Season
Follow our award-winning season that took us to Worlds in Houston, Texas.
September 10, 2022: FTC Game Reveal and Kickoff
|
On September 10th, First Tech Challenge revealed the season's game--PowerPlay--officially kicking off the season. The team spent the weekend brainstorming different ways to maximize our robot for the season and discussing what would be the best way to optimize our scores in matches.
The game features poles of different heights that robots must place cones on to score points. Watch the video on the right to learn more about the season game. |
|
October 2022: V1 Prototype Complete
|
From kickoff to mid-October, the team prototyped different ideas for our five modules: drivetrain, ground intake, deposit, slides, and turret. After comparing different designs, we prototypes our robot in wood to determine it's reliability and if we need to make any changes in the design. In this design, we utilized a pass-through which we later changed.
|

|
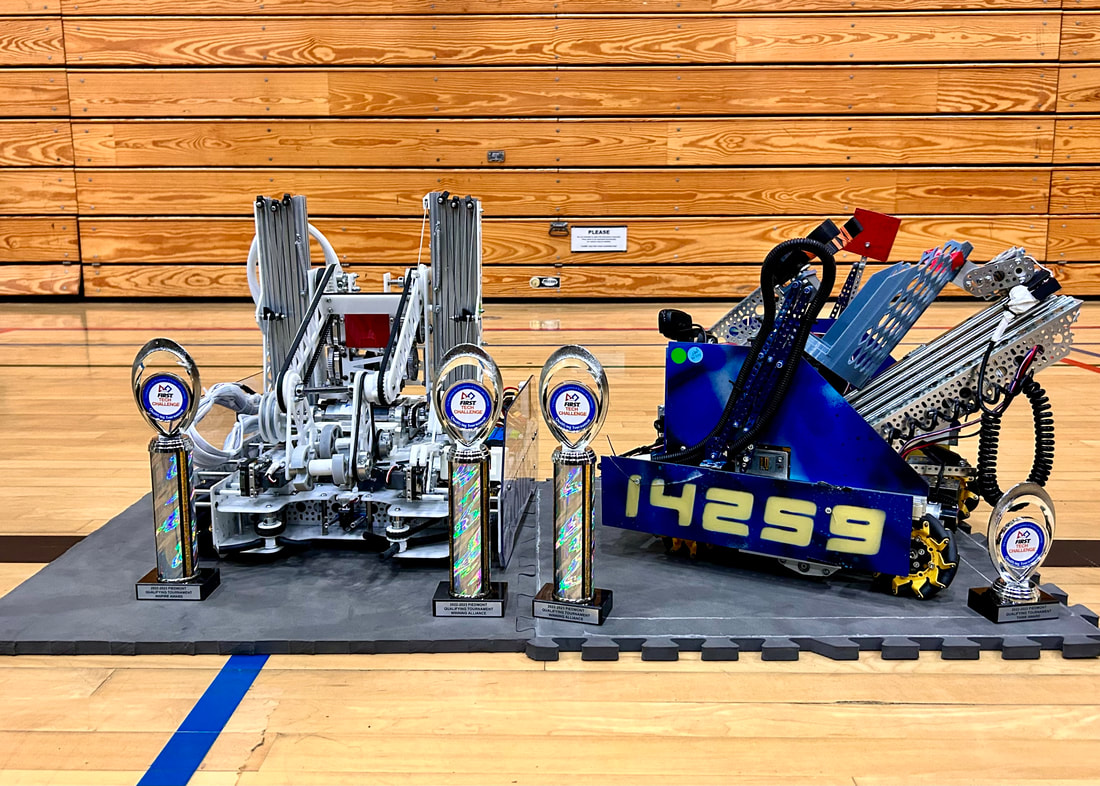
December 10, 2022: V2 Prototype and Piedmont Qualifier
|
On December 10th, 2022, we competed in our first qualifier of the season. For this, we had completed a prototype in full delrin.
We went 3-2 in our qualification matches ranking us in second after the qualification rounds. We were picked by the 1st ranked team 14259 Turbo V8. Beating the 4th seed alliance in the semifinal and the 2nd seed alliance in the final, we became the Winning Alliance First Picks. We also won the Inspire Award for the tournament, securing our advancement to Regionals in March 2023. |
|


December 11, 2021: Cuttlefish Compete at Our First Qualifier
|
On December 11th, Cuttlefish traveled to Sacramento to compete at our Qualifying Tournament. Until this point, Cuttlefish had been working hard to create an effective robot out of Delrin and other manufactured parts.
In our Qualification matches, we went 4-1 placing us in the third spot after qual matches. We were picked by the first place team, 11039 Innov8rz, during alliance selection and our alliance won our semifinal match 2-1 and the final 2-0 winning the entire competition. Our team also won the Inspire Award at the Qualifier securing our advancement to Regionals later that year.
|

|
March 12, 2022: Cuttlefish Compete at Regionals
|
After winning Inspire at Qualifiers, the team decided against competing at a second qualifying event, instead opting to focus on enhancing our robot to peak performance. The team opted to completely redo the robot after evaluating its shortcomings at the tournament.
After grueling weeks of minor changes and daily driver practice, the team was finally ready to compete at Regionals. Again during our qualification matches we went 4-0 securing our top spot after qualification. During the break we choose teams 7390 MSET Jellyfish and 16236 Juice winning the Gold Division semifinals and finals both 2-0. After a tough three matches, our team lost in the Regional Finals 1-2. After anxiously waiting through awards, the team won the Inspire Award, advancing us to Worlds. |
|
March-April 2022: Cuttlefish prepare for WORLDS
|
After the excitement of qualifying for Worlds passed, the team realized that we had a lot of work to do before being ready for Worlds. Not only did hardware and software need to touch up the robot, but management needed to work hard to prepare ourselves for the judging we would face. After long hours, driver practicing, coding, and preparing materials, we were finally ready for worlds.
|
|


April 19-22, 2023: Cuttlefish Compete at Wolds (Houston, TX)
|
It was time to put all of our hard work to the test, an entire year's of effort all came down to this week in Houston. After early flights and late nights in hotel rooms rehearsing every movement in our presentation, we were ready. We felt strong after our presentation and were ready to compete. We set up our pit with everything we could think of: free rubber ducks, extra notebooks, and a 48 square foot handmade poster.
We were tested to the limit, going 3-5 in our qualification matches. However, our robot was noticed by other teams and we were picked in the second round by teams 7172 Technical Difficulties and 16461 Infinite Turtles. Although we lost in the first semifinal we went down with a fight taking it to the third match. Even though it was tough we were proud of making it to the division playoff matches and anxiously waited the judging. Throughout the five days we were approached by countless judges and subjected to many questions about our robot's modules, software enhancement, and outreach events. After sitting at the edge of our seats we were finally announced as the Inspire Award Finalists. Looking back on the competition we were so lucky to interact with so many teams around the world and compete against the best of the best. We want to thank our mentors who stuck with us and helped us along this incredible season. |


|

|

|
|
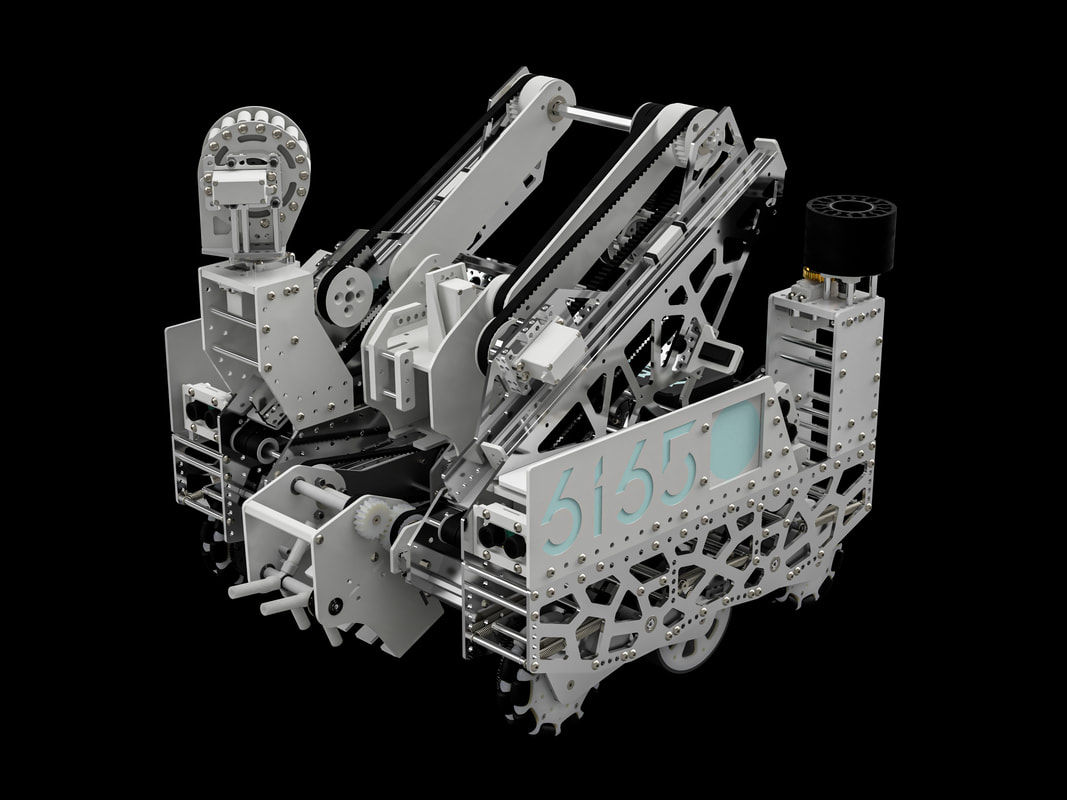
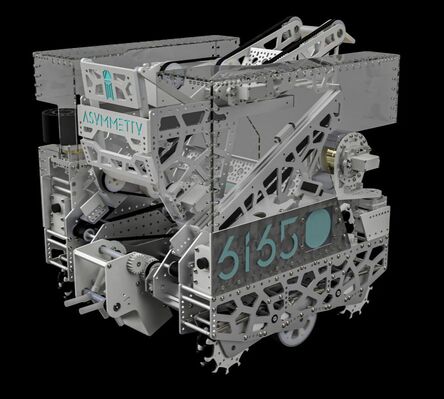
Our Robot
Our robot featured five modules: drivetrain, intake, deposit, carousel, and team shipping element.
DrivetrainOur 4 motor mecanum drivetrain is equipped with retractable odometry pods to accurately track the robot's position in autonomous and clear ground junctions in tele-op.
To effectively complete autonomous functions we utilized Kotlin Coroutines to simultaneously read multiple sensors and direct multiple motors. We also created a custom-task scheduler to run actions based on when other actions occur
|

|
Ground IntakeSurgical tubing rollers actively intake cones and a one way door prevents the cone lip from getting stuck under the intake.
We also implemented a color-distance sensor to detect when a cone has been taken in and automatically close our deposit claw to increase efficiency and minimize driver error and lag. A low-pass noise filter layered on top minimizes erratic sensor readings. Lastly we use color-based vision detection to read the signal sleeve and use HSV which is more accurate in different lighting.
|

|
DepositOur deposit mechanism featured belted angled slides, a servo-driven horizontal extension, and a virtual four bar mechanism. The combination of these three mechanisms allowed us to both score efficiently and be resistant to any potential defensive play.
To combat the large change in inertia when extending our deposit, we created an algorithm called inertial compensation, that proportionally raised the turning power based on the real-time change in moment of inertia of the robot.
|

|
TurretOur carousel mechanism worked to deliver all 9 ducks during the endgame
|

|
Team Shipping ElementWe utilized a 3-axis tape-measure turret that can extend up to 10 feet, picking up the team shipping elements with magnets
|
|
Our Graduating Seniors
We are so proud of seniors and excited to see where they will go next.
|
Trevor Leung
University of California, Berkeley bioengineering |
Emily Lu
University of California, Los Angeles electrical engineering |
Matthew Song
Johns Hopkins University computer science & biology |
Martin Xu
University of Illinois, Urbana-Champaign electrical engineering |
Apoorva Talwalkar
Brown University computer science & art |
